

A.Yorita is currently a visiting researcher member in the Kubota laboratory. His research interests are mainly in the development of stress management systems for doctors and nurses and robotic improvisational theatre systems.
A.Yoritaは現在、久保田研究室で客員研究員をしています。研究テーマは主に医師と看護師のためのストレスマネジメントシステムやロボット即興演劇システムの開発です。
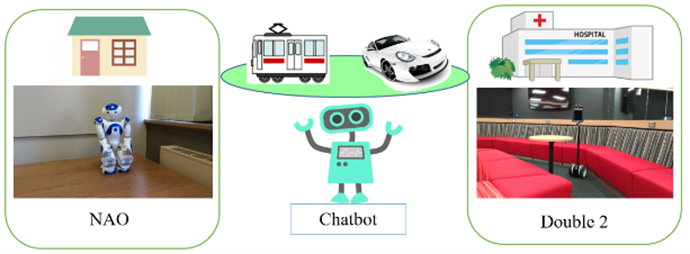
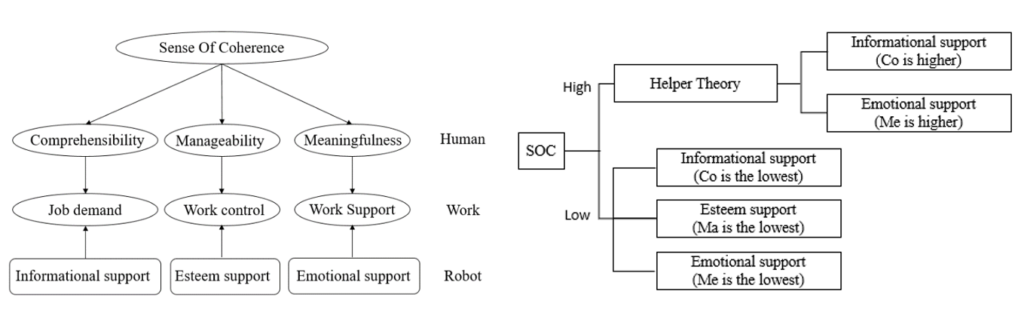
ロボット支援ストレスマネジメントシステムでは、チャットボットがストレスの測定を行い、その結果に基づいてロボットが支援を行います。ストレスの測定には首尾一貫感覚(Sense of Coherence, SOC)を用いて、把握可能感、処理可能感、有意味感のうち、弱い部分をロボットがソーシャルサポートによって支援します。ユーザの首尾一貫感覚が高い場合はユーザがロボットを支援します。
●過去の研究
Human-friendly Partner robots; MOBiMac
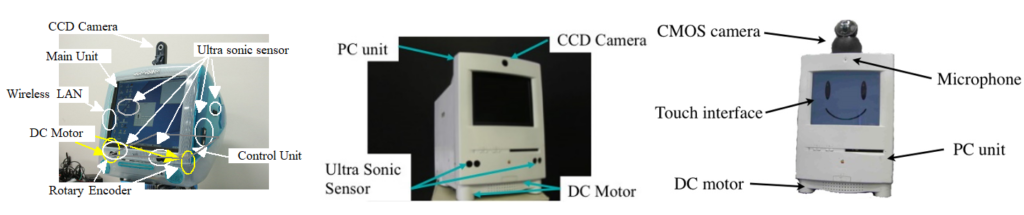
ロボット支援教育(RAI)やロボット支援言語学習(RALL)の研究に用いられていました。
ロボット支援言語学習では相互学習により学習者とロボットが互いに教えあい、英語力を高めます。
●d-TMTアプリページ