研究テーマ:柔軟な知覚システムによる移動ロボットの動的環境への実時間適応
研究キーワード:移動ロボット,ファジィ制御,知覚システム,行動調停,アフォーダンス
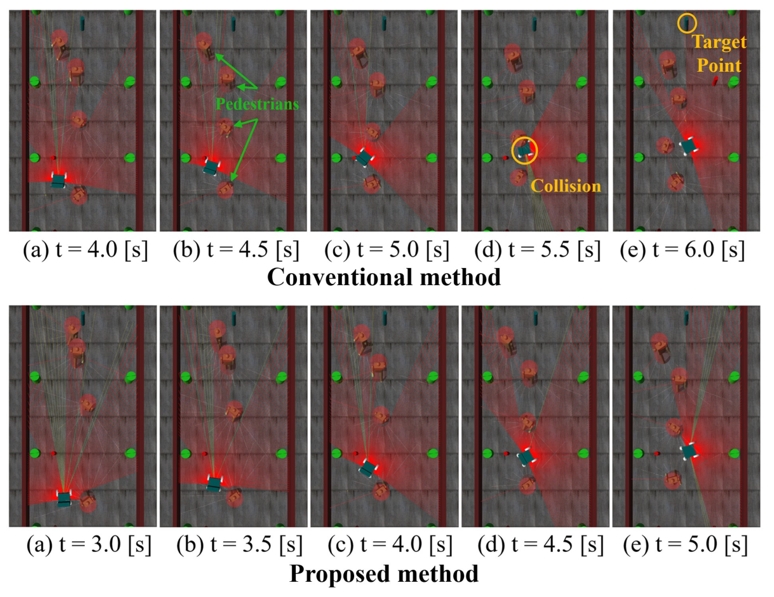
私は移動ロボットのファジィ制御に関する研究を行っています.移動障害物が存在する部分空間に対応した特定の行動ルール(ファジィルール)の発火度を知覚システムにより時系列を考慮して動的に刺激・抑制することで,制御則の変更や制御器の再学習などを一切することなく,動的未知環境に実時間適応ができることを示しました.これにより,試行錯誤的な学習や事前情報を用いることなく,危険な空間に適切に注意を払って行動を制御することで,人間のように柔軟な回避行動を取りつつ,自由に人が行き交う公共空間においても安全で効率的なナビゲーションを実行できます.
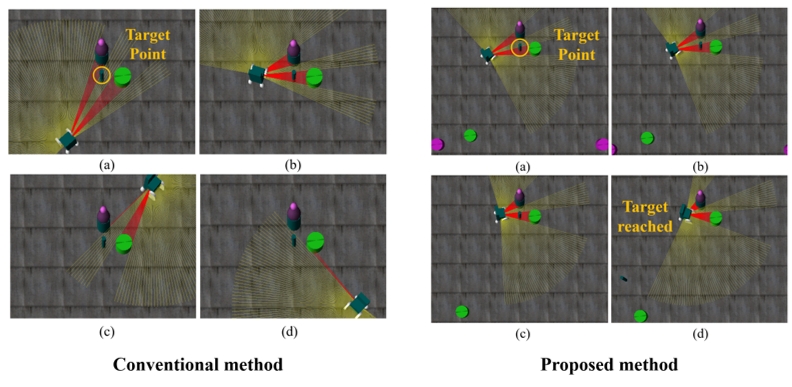
また,目的地に向かおうとすると障害物までの距離が近くなってしまうような,障害物回避行動と目標追従行動が互いに相反する状況下において,本来なら回避をする必要のない場面でも回避行動を取り続けてしまい,目標地点に到達できないことがあります.そのため,目標地点とロボットの間に障害物が存在しなければ,例え障害物までの距離が近くても,無駄な回避行動を抑制し,目標地点へ迅速に到達できるような,状況の知覚に基づく行動調停則を提案しました.