テーマ:トポロジカルマップを用いた行動推定及び移動支援ロボットの行動制御
キーワード:GNG、移動ロボット、行動予測、トポロジカルマップ
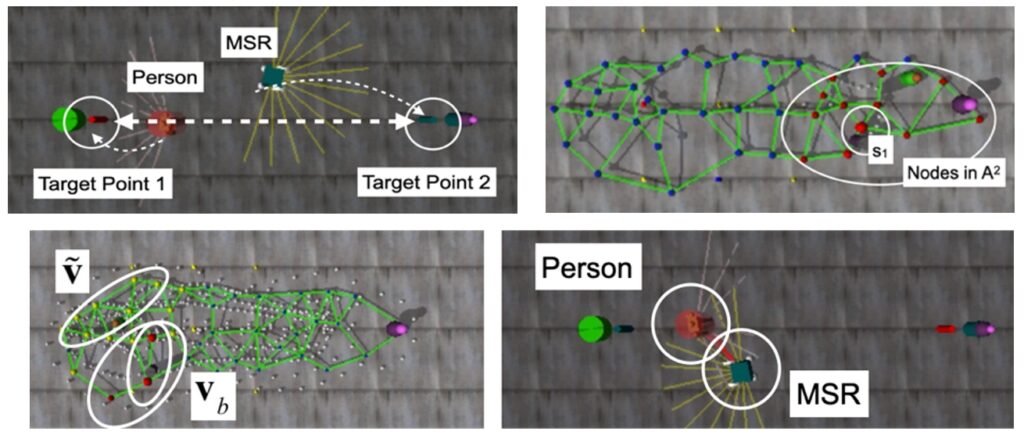
私はトポロジカルツインを用いたロボットの行動予測についての研究を行なっています。
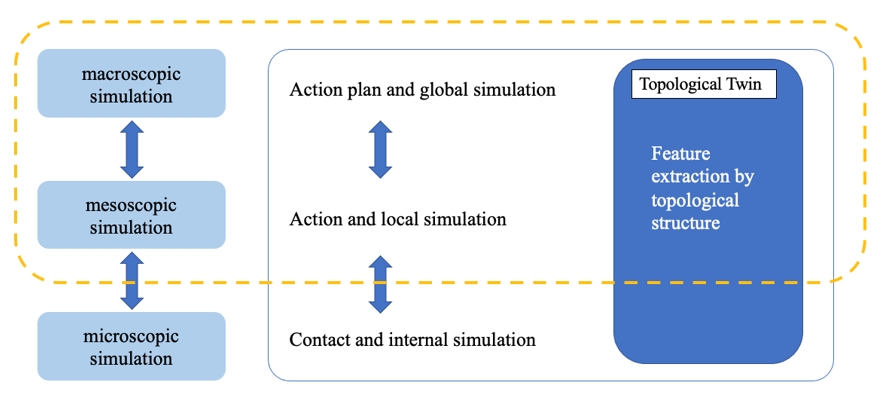
これは、近年IoTの発達などにより実空間上のさまざまなデータが計測され,利用できる様になっている.それに伴い,デジタルツインなど実世界をサイバー空間上で扱う研究が行われている.しかし,異なる種類,時間軸のビッグデータを同時に扱わなければならないため,これらを全てシミュレーションしてロボットに行動予測,制御を行うのは計算量も莫大になってしまうため困難である.そこで,人の行動からトポロジカルな構造を抽出し,それらを用いることでより少ない計算量で大域的な行動推定を行う.