
Research Summary
1.AQuRo: a Cat-like Adaptive Quadruped Robot with Novel Bio- inspired Capabilities
There are currently many quadruped robots suited to a wide range of applications, but traversing some terrains, such as vertical ladders, remains an open challenge. There is still a need to develop adaptive robots that can walk and climb efficiently. This research presents an adaptive quadruped robot that, by mimicking feline structure, supports several novel capabilities. We design a novel paw structure and several point-cloud-based sensory structures incorporating a quad-composite time-of-flight sensor and a dual-laser range finder. The proposed robot is equipped with physical and cognitive capabilities which include: 1) a dynamic-density topological map building with attention model, 2) affordance perception using the topological map, and 3) a neural-based locomotion model. The novel capabilities show strong integration between locomotion and internal–external sensory information, enabling short-term adaptations in response to environmental changes. The robot performed well in several situations: walking on natural terrain, walking with a leg malfunction, avoiding a sudden obstacle, climbing a vertical ladder. Further, we consider current problems and future development.
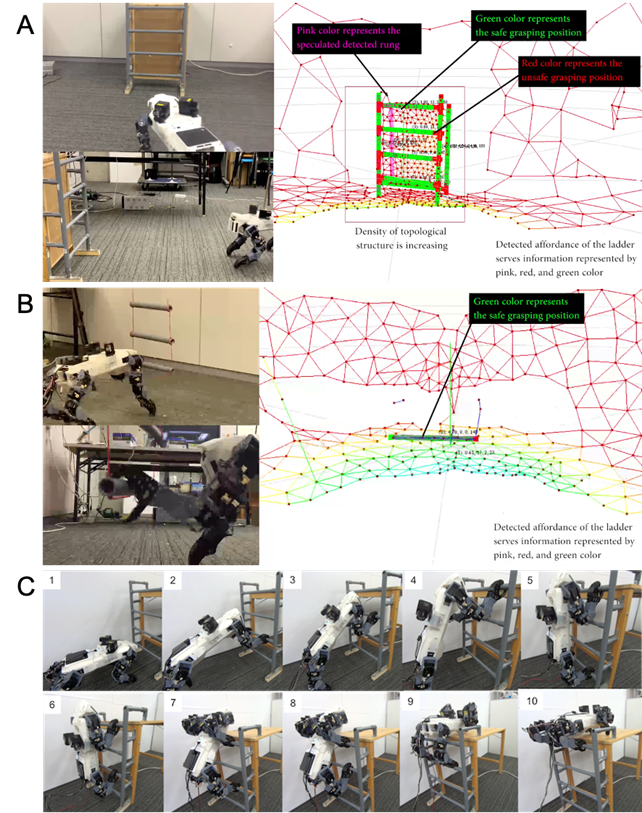
The robot detects the ladder’s affordances while approaching it. B) Robot detects graspability of a swinging ladder and grasps a rung of the moving ladder. C) The snapshot video of the robot performance detailed in the link of Video 5. The robot approaches and climbs a ladder, then transitions back to a horizontal posture to stand on the tabletop (frames 9–10).
2.Combining Reflexes and External Sensory Information in a Neuro-Musculoskeletal Model to Control a Quadruped Robot
This research examines the importance of integrating locomotion and cognitive information for achieving dynamic locomotion from a viewpoint combining biology and ecological psychology. We present a mammalian neuro-musculoskeletal model from external sensory information processing to muscle activation, which includes: 1) a visual-attention control mech- anism for controlling attention to external inputs, 2) object recognition representing the primary motor cortex, 3) a motor control model that determines motor commands traveling down the corticospinal and reticulospinal tracts, 4) a central pattern generation model representing pattern generation in the spinal cord, and 5) a muscle reflex model representing the muscle model and its reflex mechanism. The proposed model is able to generate locomotion of a quadruped robot in flat and natural terrain. The experiment also shows the importance of a postural reflex mech- anism when experiencing a sudden obstacle. We show the reflex mechanism when a sudden obstacle is separately detected from both external (retina) and internal (touching afferent) sensory information. We present the biological rationale for supporting the proposed model.
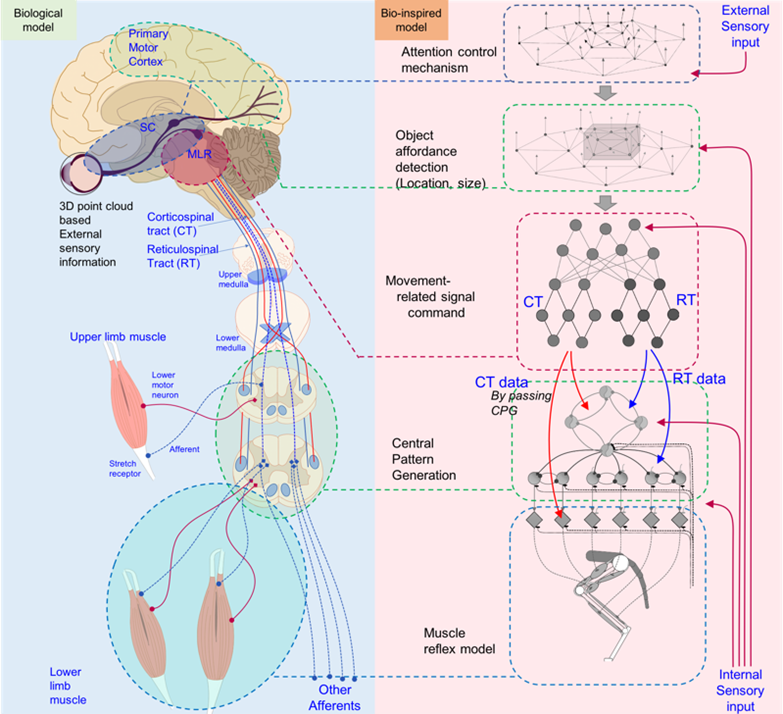
Design of the motion control pathway from neurophysiological and ecological psychological viewpoint
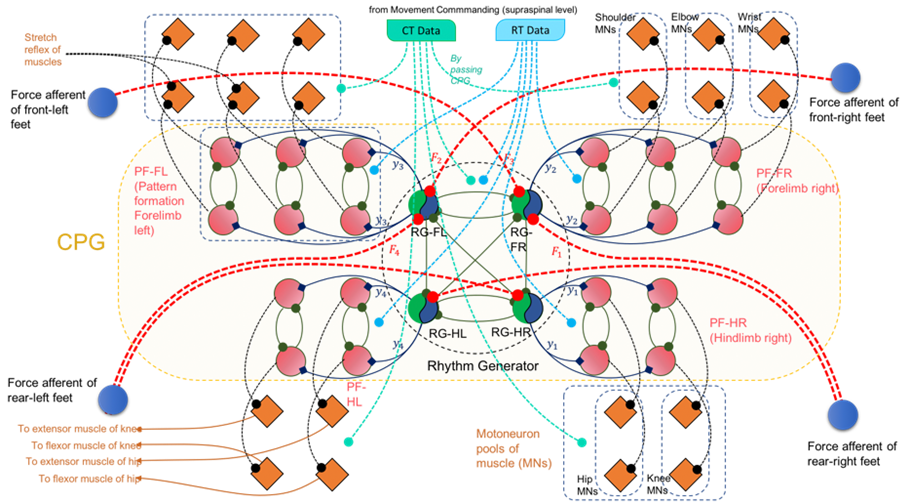
Design of two-layered CPG with distributed rhythm generator and pattern formation
3.A Real-time Control System of Upper-limb Human Musculoskeletal Model
Human musculoskeletal model simulation implies extensive mathematical calculations, especially for physical dynamics and biological fidelity. Therefore, it is difficult to reach the real-time process of muscle estima- tion. On the other hand, real-time processes affect the application and advanced analysis. Therefore, this research aims to realize real-time muscle activity estimation using human musculoskeletal simulation with environmental in- tegration. We focus on the upper extremity of the human musculoskeletal model with 50 hill-type muscles. We build the model in MuJoCo simulation in including surrounding environments. The input of human posture is acquired from single RGBD sensors composed of 32 3D node positions. We provide inverse kinematics calculation to convert hu- man posture data to the joint angle level of the simulation model. We control the stretch reflex of each muscle to move the target joints. The target muscle stretch length is calculated from the mechanical integration between the body and the muscle-tendon. The artificial force can be added in a certain position to represent any external load. To validate our model, we conduct the basic movement of the upper extremity and compare the resulted muscle estimation and EMG sensors. The proposed model can estimate muscle activation, including the force of each muscle. Further experiments show that the proposed model can be integrated with dynamic environmental conditions for a seamless human physical monitoring system.
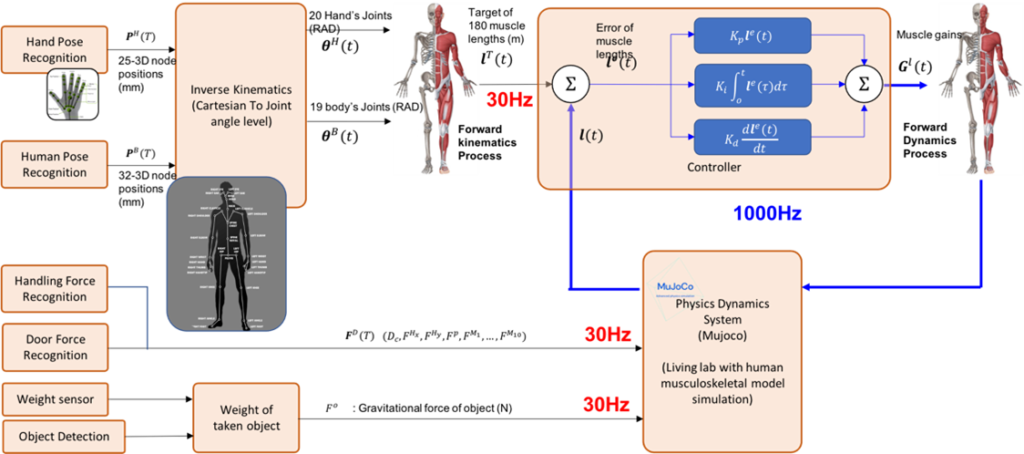
Overall control system of human musculoskeletal model.
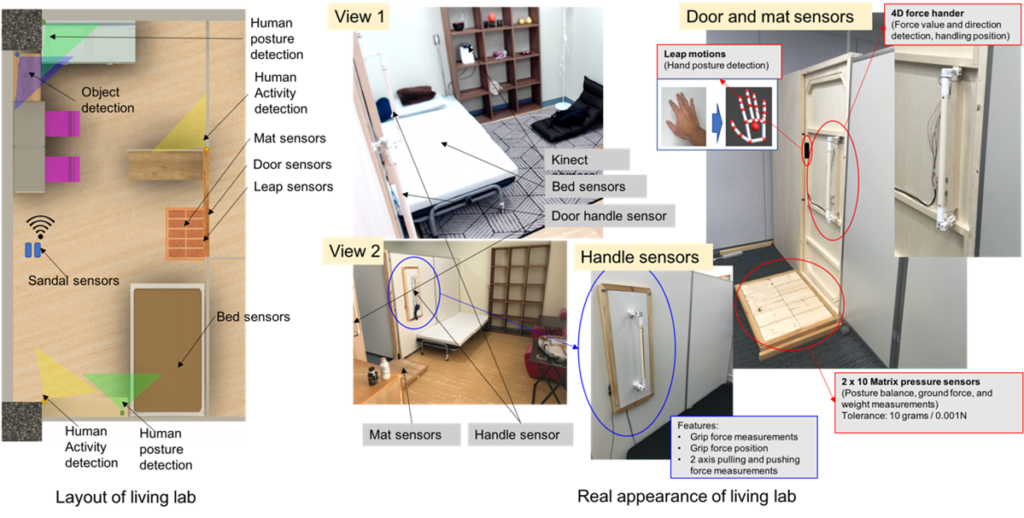
Layout of living lab that is used in the proposed experiments