本研究で開発するロボットパートナーは、空港や展示会場、ショッピングセンターでの情報支援の他、高齢者の見守りや健康づくり支援などのサー ビスの実現を主な目的としています。基本的には、バーバル/ノンバーバル・コミュニケーションが最も重要になりますが、迅速な実用化を目指すためには、各 種知的モジュールのインテグレーションが重要になります。ロボットの開発も、「すり合わせ技術」による開発から「組合せ技術」への転換が進み、音声認識、 音声合成、各種画像処理に関する要素技術は、オープンソースを利用することにより、実用的なインテグレーションが容易に行えるようになりました。また、ロ ボットパートナーの開発には、多くのセンサや通信機能を必要とするため、低価格と耐故障性の向上を目指す場合、スマートデバイスを活用することにより、使用目的にあわせた最低限の機能のみを実装したロボットパートナーを開発すれば、実用化が容易になります。
したがって、本研究では、IoTに関する研究の背景などを考慮し、誰もが実装しやすいロボットパートナーへのシステムインテグレーションの方法論につい て検討しています。具体的には、iOSデバイスの機能を最大限、活かしたロボットパートナーの開発を行うためのソフトウェア、ハードウェアのモジュール化 を行ってきました。また、既存のライブラリを効率良く利用するためのプラットフォームを構築するとともに、バーバル/ノンバーバル・コミュニケーションに 必要な様々な機能のモジュール化を行うとともに、対話コンテンツを容易に設計、実装できる仕組みを構築しています。
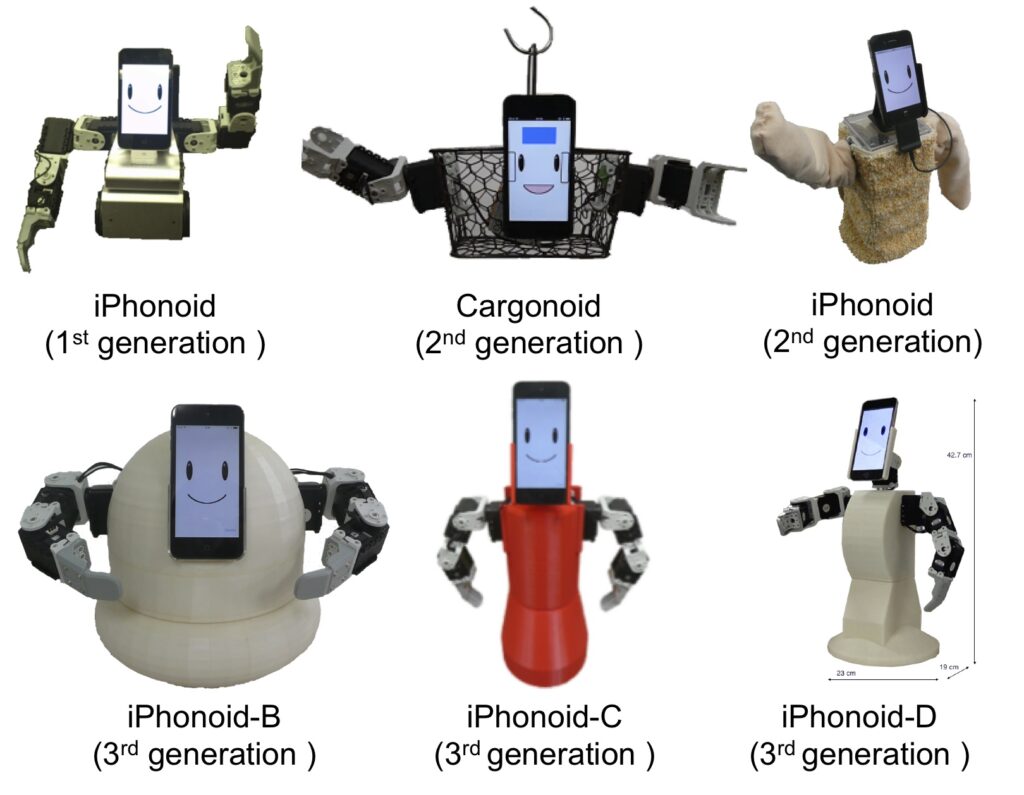
一方で、ロボットのデザインに関して、音声、映像、動きなどのマルチモーダルな情報をどのように使い分けながら、提示するのが最も効果的であるのかを使 用目的にあわせて検討する必要があります。したがって、本研究では、スマートデバイスを用いた様々なロボットパートナーのカタチを考えながら、具現化を目指しています。