
「照度測定ロボットのSLAM」
キーワード : 移動ロボット,照度測定,SLAM,CAD図面,運動学モデル
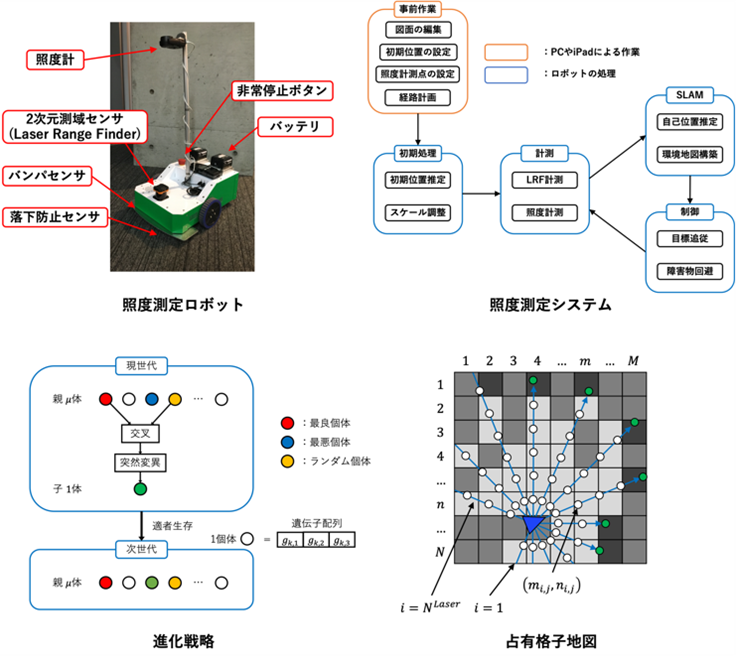
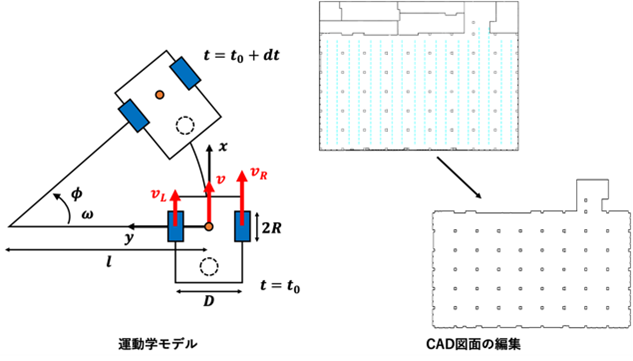
私は主に照度測定ロボットのSLAMに関する研究をしています。建設現場では日没後に行う照度測定作業の効率化、省力化が求められており、久保田研究室では株式会社きんでんと共同で、照度測定作業を自動化する自律移動ロボットを開発してきました。自律移動の基幹技術であるSLAMには、自然界の進化を模倣した進化戦略と呼ばれる最適化手法を利用しており、高速で強固な位置推定を可能としています。しかし、大規模な環境ではSLAMが不安定となる問題があり、作業効率化のためにSLAM安定化の技術が求められています。そこで、建設現場のCAD図面を用いた位置修正や、ロボットの運動学モデルによる予測結果の併用による成功率の向上を目指しています。
また、3D-LiDARを用いてさらなるSLAMの安定化や、傾斜・不整地への対応に関する研究を進めています。